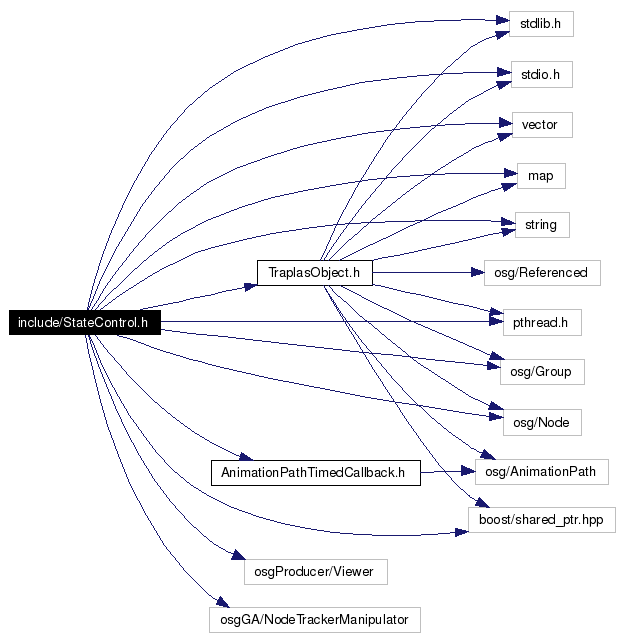
#include <stdlib.h>#include <stdio.h>#include <vector>#include <map>#include <string>#include <pthread.h>#include <osg/Group>#include <osg/Node>#include <osgProducer/Viewer>#include <osgGA/NodeTrackerManipulator>#include <AnimationPathTimedCallback.h>#include "TraplasObject.h"#include <boost/shared_ptr.hpp>Include dependency graph for StateControl.h:
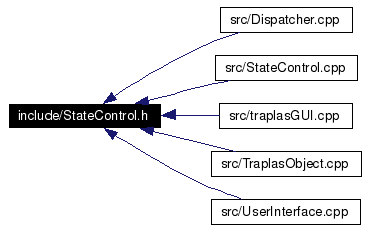
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | StateControl |
| Class that maintains the osg world and handles any changes to the state of the world. More... | |
Defines | |
| #define | STATECONTROL_H |
| #define | CARGO 0 |
| #define | TRANSPORT 1 |
| #define | LOCATION 2 |
|
|
Definition at line 78 of file StateControl.h. Referenced by StateControl::newcarg(), StateControl::readMapping(), and StateControl::StateControl(). |
|
|
Definition at line 80 of file StateControl.h. Referenced by StateControl::location(), StateControl::readMapping(), and StateControl::StateControl(). |
|
|
Traplas visualisation. Copyright (C) 2006 Herbert de Vos & Willem Drost This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 2 of the License, or (at your option) any later version. This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with this program; if not, write to the Free Software Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA (For full Licence see ../GPL-Licence.txt) Definition at line 17 of file StateControl.h. |
|
|
Definition at line 79 of file StateControl.h. Referenced by StateControl::readMapping(), StateControl::StateControl(), and StateControl::trnew(). |
 1.4.4
1.4.4